
Dataset
Download
- Training Data: download from Lab Server.
- Test Data: download from Lab Server.
Dataset Format
Each sequence would provide several ‘sensors’ along with their sensor.yaml file that specifies sensor type, intrinsic and extrinsic parameters.
The sensor measurements(or measurement indices, for camera) is stored in data.csv.
In our case, both camera and IMU data would be provided.
The htc and groundtruth are also treated like a ‘sensor’.
Here is two example:
train_data/circle/huawei-mate30-pro.tar.xz
|--camera
| `--images
| |--6158863991000.png
| |--6158897604000.png
| `--...
| |--data.csv
| |--sensor.yaml
|--imu
| |--data.csv
| `--sensor.yaml
|--htc
| |--data.csv
| `--sensor.yaml
`--groundtruth
| |--data.csv
| |--sensor.yaml
| `--euroc_gt_body.csv
train_data/general/huawei-mate30-pro/2022-11-21-11-45-19-465-normal-walk-f1.tar.xz
|--camera
| `--images
| |--76204892580000.png
| |--76204926193000.png
| `--...
| |--data.csv
| |--sensor.yaml
|--imu
| |--data.csv
| `--sensor.yaml
`--groundtruth
| `--euroc_gt_body.csv
Dataset Preview
- General: Hold the phone normally to simulate the user's daily usage scenario;
- Circle: The operator is walking around a 2m radius circle twice.as shown below. This is the simplest sub-dataset, in whichmost feature points have sufficient visual parallax, and lMU expe.riences sufficient motion excitation along all axes;
- Line: The operator is walking forth and back along a 10mline, as shown below.This is a typical motion during ARnavigation.It presents greater challenges compared to “'circle’’because IMU experiences less motion excitation along the straightline, and feature points quickly leave the field of view whenturning around.
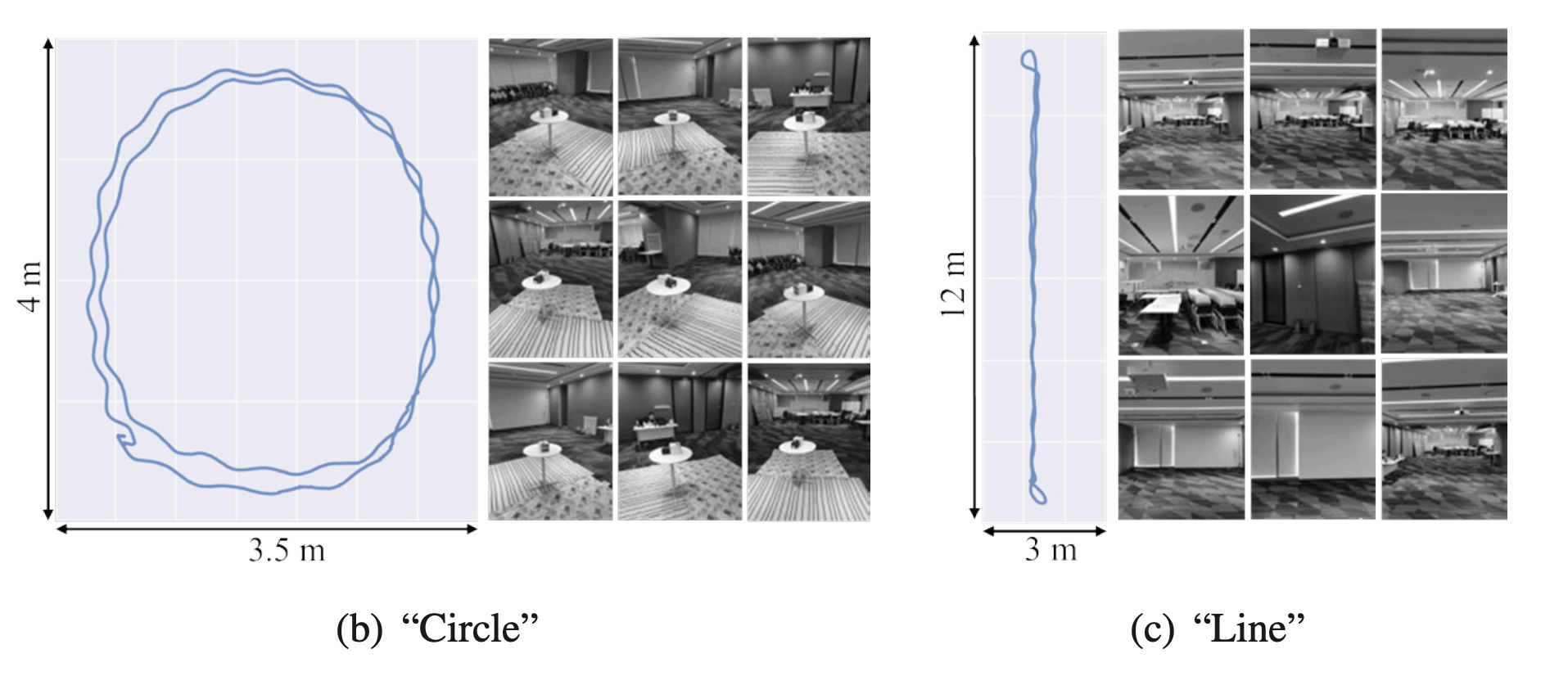
VI-SLAM challenge dataset preview of small scenarios from China SLAM 2024
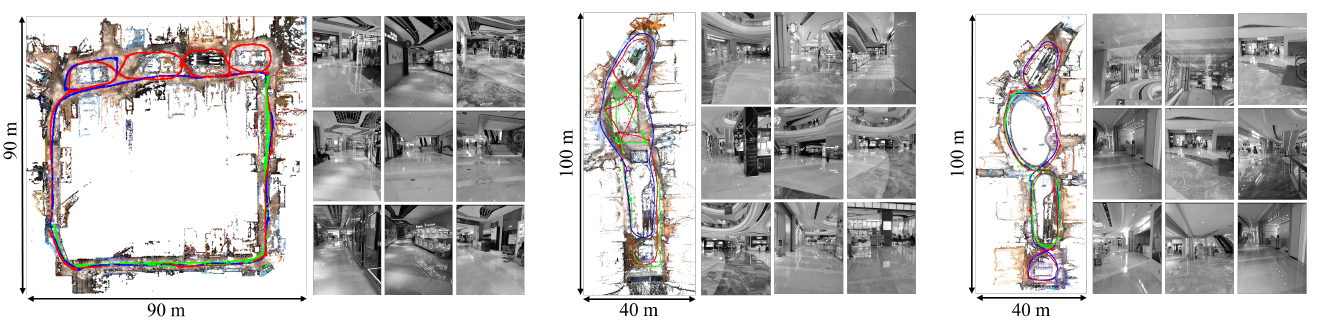
VI-SLAM challenge dataset preview of big scenarios from China SLAM 2024