
title = {Survey and Evaluation of Monocular Visual-Inertial SLAM Algorithms for Augmented Reality},
author = {Jinyu Li, Bangbang Yang, Danpeng Chen, Nan Wang, Guofeng Zhang*, Hujun Bao*},
journal = {Journal of Virtual Reality & Intelligent Hardware},
year = {2019},
volume = {1},
number = {4},
pages = {386-410},
url = {http://www.vr-ih.com/vrih/html/EN/10.3724/SP.J.2096-5796.2018.0011/article.html},
doi = {10.3724/SP.J.2096-5796.2018.0011}
}
SLAM for AR Competition @ISMAR 2019
News
- Click here to visit our competition Homepage.
- The competition results and the system descriptions has been published.
- Competition Results - V-SLAM
- Competition Results - VI-SLAM
Overview
We provide a visual-inertial dataset as well as a series of evaluation criteria for AR.
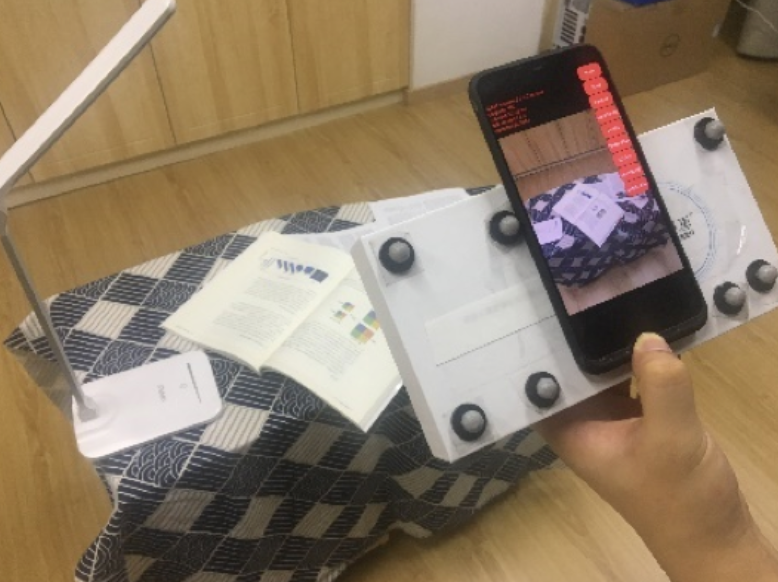
Groundtruth
Ground truth data is obtained from a VICON motion capture system. It provides 6D pose measurements of the phone at 400Hz. The body frame of the phone is determined from a set of special markers. The phone is rigidly attached to a marker object for VICON localization.
Devices Info
Here are the device device infomation.
| Device Name | Characterisitics |
|---|---|
| Xiaomi MI8 | Camera:640x480 at 30fps, rolling shutter |
| IMU: 400HZ | |
| iPhone X | Camera:640x480 at 30fps, rolling shutter |
| IMU: 100HZ |
Citations
If you are using this dataset for research, please cite the following publication (article link):
@article{