
title={100-Phones: A Large VI-SLAM Dataset for Augmented Reality Towards Mass Deployment on Mobile Phones},
author = {Zhang, Guofeng and Yuan, Jin and Liu, Haomin and Peng, Zhen and Li, Chunlei and Wang, Zibin and Bao, Hujun},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2024},
volume = {30},
number = {5},
pages = {2098-2108},
doi = {10.1109/TVCG.2024.3372133}
}
ChinaSLAM 2024 —— VI SLAM
Overview
We provide a visual-inertial dataset as well as a series of evaluation criteria for AR.
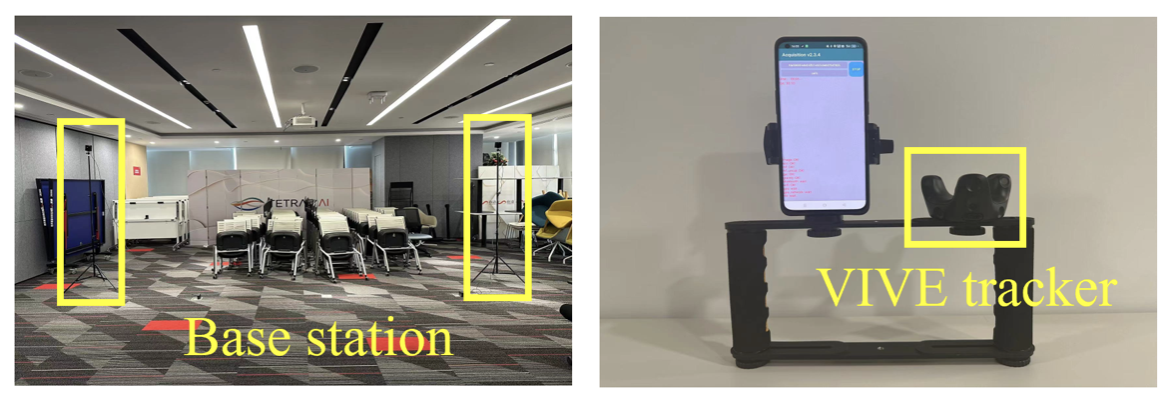
Groundtruth
- HTC VIVE is used to obtain the GT poses for its portability and cm-level accuracy in small scenes.
- To achieve GT trajectories in large-scale scenes, the visual HD map is pre-built by SfM, and GT is recovered by combining visual localization and visual-inertial constraints, achieving cm-level accuracy.
Devices Info
Here are the device device infomation.
| Device Name | Image Characterisitics | IMU Characterisitics |
|---|---|---|
| HUAWAI Mate 30 Pro | Camera:640x480, 24fps, rolling shutter | IMU: 480HZ |
| VIVO IQOO 7 X | Camera:640x480, 30fps, rolling shutter | IMU: 417HZ |
| VIVO IQOO Z3 | Camera:640x480, 30fps, rolling shutter | IMU: 202HZ |
| VIVO S7t | Camera:640x480, 27fps, rolling shutter | IMU: 202HZ |
| Xiaomi 9 | Camera:640x480, 21fps, rolling shutter | IMU: 411HZ |
Citations
If you are using this dataset for research, please cite the following publications (article link):
@ARTICLE{
and (article link)
@ARTICLE{
title={A Low-Cost and Scalable Framework to Build Large-Scale Localization Benchmark for Augmented Reality},
author={Liu, Haomin and Zhao, Linsheng and Peng, Zhen and Xie, Weijian and Jiang, Mingxuan and Zha, Hongbin and Bao, Hujun and Zhang, Guofeng},
journal={IEEE Transactions on Circuits and Systems for Video Technology},
year={2024},
volume={34},
number={4},
pages={2274-2288},
doi={10.1109/TCSVT.2023.3306160}}
}
author={Liu, Haomin and Zhao, Linsheng and Peng, Zhen and Xie, Weijian and Jiang, Mingxuan and Zha, Hongbin and Bao, Hujun and Zhang, Guofeng},
journal={IEEE Transactions on Circuits and Systems for Video Technology},
year={2024},
volume={34},
number={4},
pages={2274-2288},
doi={10.1109/TCSVT.2023.3306160}}